END OF ARM TOOLING

An end
effector, or end of arm tooling (EOAT), is essentially the
hand of a robot. The most common form used in
manufacturing is called a gripper which will have two or more
"fingers". Selections are made based on the shape,
texture, and weight of the object the robot needs to pick
up.
ROBOT END EFFECTOR
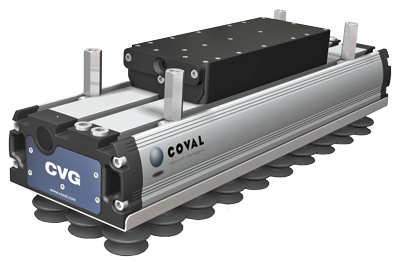
Because the shape of objects involved in manufacturing
is varied, end-of-arm-tools have been developed to be highly
adaptable and flexible. In addition to grippers, vacuum cups
and other methods of picking up parts, end effectors can also
be tools that act to inspect, or even change the part, rather
than to pick it up.
ROBOT GRIPPER
Integral
to operation of a mechanical tool, is the ability to send
commands to the end of arm tooling, and then also to receive
signals back from the tool. Pairing the optimal robot
and vacuum gripper to accomplish a specific task is part of
what HTE's
TECHTEAM of robot specialist do for our
customers. Creative solutions are as varied as the
number of applications manufacturers want to automate.
End-effector tools include a wide array of choices such as:
grippers, vacuum cups, cameras, sensors, polishers, sanders,
drills, spray guns, magnets, and welding guns.
If your plant is located in
Kansas, Missouri, or
Illinois, HTE Automation will optimize an EOAT
end-effector solution that works within your budget. Please call HTE Automation at 800-444-4831 to speak with a robotic automation specialist, or email us at webinfo@htetech.com.






 An end
effector, or end of arm tooling (EOAT), is essentially the
hand of a robot. The most common form used in
manufacturing is called a gripper which will have two or more
"fingers". Selections are made based on the shape,
texture, and weight of the object the robot needs to pick
up.
An end
effector, or end of arm tooling (EOAT), is essentially the
hand of a robot. The most common form used in
manufacturing is called a gripper which will have two or more
"fingers". Selections are made based on the shape,
texture, and weight of the object the robot needs to pick
up. 